Optimization of design parameters of non-contact Bernoulli gripping devices of industrial robots
Автор: Роман Михайлишин, Roman Mykhailyshyn, ТНТУ
Мета проекту:
Метою роботи є обґрунтування конструкції соплових елементів, активної поверхні та експлуатаційних параметрів струминних захоплювальних пристроїв для підвищення їх піднімальної здатності та зниження енергозатрат за рахунок ефективного використання енергії потоку повітря.
The purpose of the project is to justify the construction of nozzle elements, active surface and operating parameters of Bernoulli grippers to increase their lifting force and reduce energy costs due to the efficient use of air flow energy.
Проблеми, які вирішуються:
1. Розробка математичної моделі для розрахунку силових характеристик струминних захоплювачів із циліндричним та кільцевим соплом.
2. Обґрунтування впливу геометричних параметрів соплових елементів та активної поверхні струминних захоплювачів на їх силові характеристики.
3. Дослідження розподілу розрідження на поверхні об’єктів маніпулювання та силових характеристик струминних захоплювачів, визначення їх раціональних конструктивних параметрів, підтвердження встановлених теоретичних залежностей.
Одержані результати будуть актуальні для підвищення ефективності пневматичних захоплювальних пристроїв промислових роботів та їх проектування.
1. Development of mathematical model for calculation of power characteristics of Bernoulli grippers with cylindrical and circular nozzle.
2. Substantiation of influence of geometrical parameters of nozzle elements and active surface of Bernoulli grippers on their power characteristics.
3. Investigation of the distribution of vacuum on the surface of objects of manipulation and power characteristics of Bernoulli grippers, determination of their rational structural parameters, confirmation of established theoretical dependencies.
The results obtained will be relevant for increasing the effectiveness of pneumatic grippers devices for industrial robots.
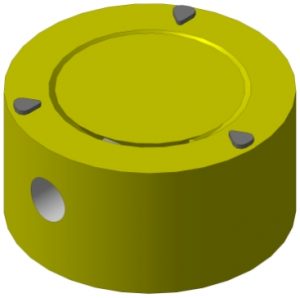
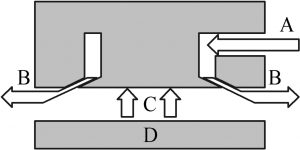
Fig. 1. 3D model of Bernoulli gripping device and principle of its action: A – compressed air, B – air flow, C – lifting capacity, D – object
Gasdynamic analysis of the interaction of Bernoulli grippers with the surface of flat objects in which the center of mass is displaced
Газдинамичний аналіз взаємодії струминних захоплювальних пристроїв з поверхнею плоских об’єктів, в яких зміщений центр мас
Abstract. The contactless transport of a flat object with a displaced center of mass by means of the Bernoulli gripper is considered. When shifting the center of mass of the object of manipulation relative to the axis of the Bernoulli gripping device, there is a deviation from the parallelism between their active surfaces in the static position. For this case, we propose formulas for calculating the distribution of air pressure in the radial gap between the active surfaces of the Bernoulli gripper and the object of manipulation. Analysis of the nature of the distribution of rarefaction on the surface of the object of manipulation has shown that the asymmetry of the distribution depends on the magnitude of the displacement of the center of the mass of the object. The method of calculating the force and torque associated with the action of the Bernoulli gripper on the object of manipulation is proposed. The parameters characterizing the position of the object of manipulation to the Bernoulli gripper for various indexes of weight of the object and the coordinates of its center of mass are determined.
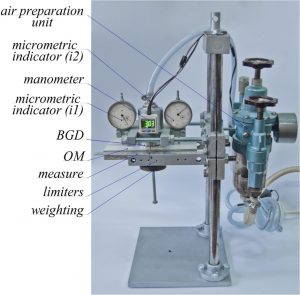
Fig. 2 General view of the experimental device